系统模型:个体、群集与混合系统
章节内容
Chapter Content
1
2
3
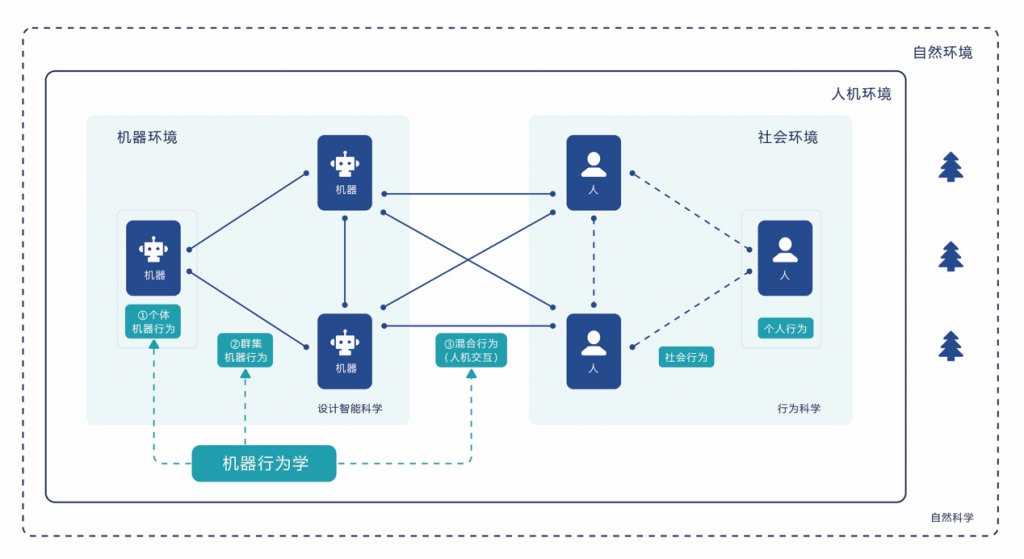
系统模型是机器行为学模型的基础,定义了机器行为学的研究范围。系统模型将机器行为分为个体机器行为、机器和机器之间的群集行为以及机器与人/社会的混合行为。个体机器行为强调算法本身的研究,群集机器行为强调研究机器之间的相互作用,混合人机行为强调研究机器与人类之间的相互作用。如果用动物行为学的理论来说明,个体机器行为是针对特定动物的研究,群集机器行为研究动物成员之间的相互作用,混合人机行为则是研究动物(人)和自然界、人类社会的所构成的一个更加广泛环境之间的相互作用。
1.个体机器行为
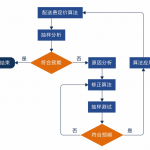
对个体机器行为的研究主要集中在特定的智能机器,关注个体机器固有的行为属性。个体机器行为可以理解为直接由代码或算法驱动的行为。个体机器行为的研究一般可以分为两种方式:研究个体机器内部行为和研究个体机器间的行为,如图2
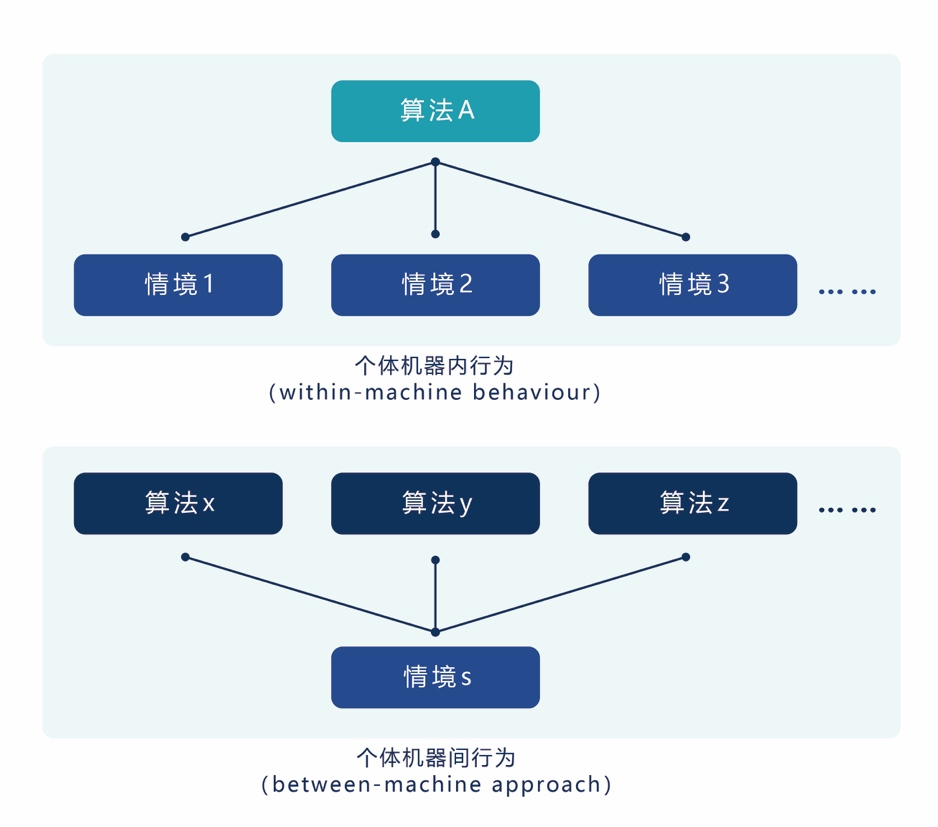
(1)个体机器内的行为(within-machine behaviour)
个体机器内的行为(within-machine behaviour)一般分析某个特定机器在不同情境下的行为。例如智能机器行为是不是在不同的情境下保持特征的一致性。一个代表性的情境是如果训练特定的底层数据,算法可能仅表现出某些特定的行为。但是反过来,当使用与训练数据有显著不同的行为与评估数据时,在模拟决策中对累积概率进行评分的算法则可能会出现全新的表征。这种全新的表征反映了个体机器行为的环境适应性。
(2)个体机器间的行为(between-machine behaviour)
个体机器间的行为(between-machine behaviour)是一种典型的A/B测试的思路,主要比较各种不同的机器在相同条件下的不同行为。例如,智能系统推送商品的行为的研究中,可以研究各种电子商务平台及其底层算法,并在同一个情境下进行投放,以检查同一批推送算法的机器间效应。多个体间机器行为也具有代表性,例如服务机器人在不同的情境下的服务效能与差异、跨平台的动态定价算法差异、自动驾驶汽车在不同环境下的超车行为等。
2.群集机器行为
相比个体机器行为的研究,群集机器行为的研究侧重于机器群集交互和智能系统范围的行为。通常认为,群集机器行为的设计受到了自然界中集群现象的启发,例如成群的昆虫,或鸟类的迁徙等。动物群体在群集行为中会表现出对复杂环境特征的紧急感知和有效的共识决策。这种情况下,群体都表现出对环境的认知,这些认知在个体动物的层面是不存在的。群集机器行为也是如此。
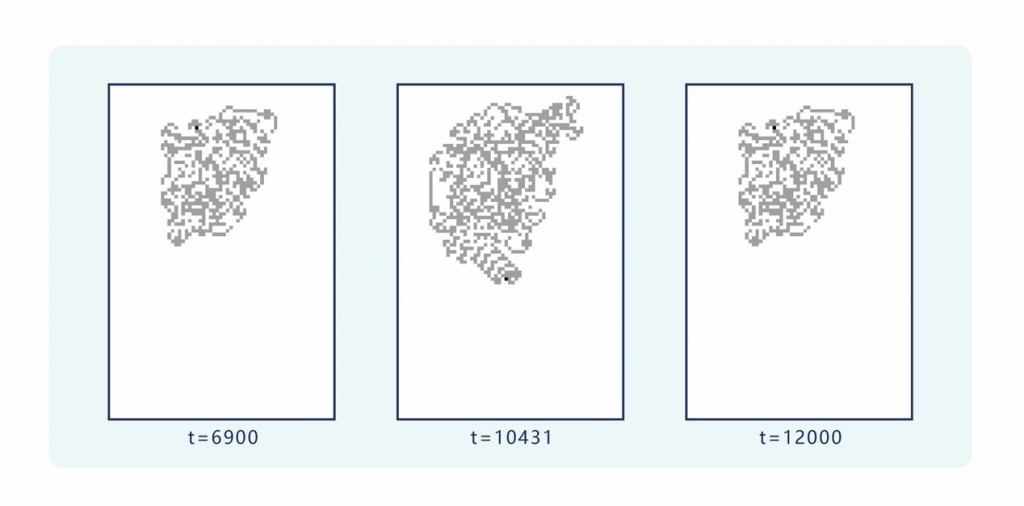
使用简单算法进行交互的机器人一旦聚合成大型集体,就会产生有趣的行为。例如,关于微型机器人的群体特性的研究发现:群体特性可以结合成类似于生物制剂系统中发现的群体聚合现象。例如,物理系统的元胞自动机模拟研究从群体行为的角度,探索机器或者人造物的“人工生命”的规律。如图5.3就是采用Langton“蚂蚁规则”的元胞自动机来模拟蚂蚁运动行为的机器行为。
在群集机器行为中,机器可能表现向自身或者其它机器学习或向人类学习的属性。同时,人与动物也可以从机器的行为中学习。这些学习所产生的“交互过程”可能从根本上改变人们的知识积累方式,甚至直接地影响人类社会。例如在金融领域,金融市场的智能机器行为已经成为主要的交易方式。在金融交易环境中已经可以观察到一些非常有趣的算法群集行为,如算法交易者可以在极短时间内,在任何人类交易者操作交易之前,对事件和其他交易者做出效应。大量的研究发现,自主操作和大规模部署的能力都显示出机器集群的交易行为与人类交易者的本质差异。如果人们无法认识到这些差异,对于某些新出现和无法预见的情况作出反应的问题。算法的相互作用很可能会产生巨大的市场危机,特别是在出现金融市场崩盘这样的“黑天鹅”事件的时候。
3.混合行为
混合行为表现了机器和机器以外的自然环境、人机环境、社会环境的交互所产生的行为,特别是人类越来越多地介入机器行为。机器可以调节人类的社交互动,塑造人类所看到在线信息,并与人类一起构建那些可以改变人类社会系统的关系。与此同时,人类社会、自然环境也会对机器的行为产生直接的影响和作用。在后面发展模型中将要提到的机器行为的适应从本质上看就是一种代表性的混合行为——不论是对人的适应还是对自然环境的适应。
在混合行为的情况下,一种典型的策略就是将机器行为置于“机器-社会(人)-自然”的混合系统中进行全面研究,而不是将机器行为作为一个单独的个体进行研究。从系统的观点来看,混合机器行为的性质和作用不仅仅依赖于机器、社会和自然本身,而是更多取决于它们之间的“关系”。
从某种意义上来说,系统就是一个目标。虽然人类很难理解自然和人类社会存在的“客观意义”,但是,从人类发展目标而言,这样的客观意义非常清晰和明确。任何人造系统都是为了某个面向“客观意义”的目标而存在。机器作为一种人造物的目标总体还是为了实现人的目标和人类社会的可持续发展,给人类带来幸福。从这个角度,可以看到机器行为学的某些本质属性:即机器行为追求的是人类社会的总体目标的最大化,而不仅仅是机器性能的最大化。基于这样的观点,可以确定整合社会目标的最大化的概念很难通过机器本身的属性来实现,需要从人-机器-社会混合的总体行为来实现。
“目标”在具体的机器行为上的体现就是功能。功能是机器在周围环境适应中所表现出来的属性。系统的每一个部分都至少具有一个功能,而这些功能结合起来又满足整个系统的一个或多个功能。从系统的概念来看,系统最根本的特征在于系统整体功能大于部分的总和。从机器行为的功能的角度看,混合机器行为的功能可以从人和机器的分工的角度,即人类和机器承担不同功能的角度来展开研究,自动驾驶汽车的自动化等级划分就是典型的混合机器行为的功能分配。
| 等级 | 名称 | 定义描述 | 持续横向和纵向车辆运动控制 | 感知和判度 | 动态驾驶任务支援 | 系统运行范围 |
|---|---|---|---|---|---|---|
| 驾驶员执行部分或全部动态驾驶任务 | ||||||
| 0 | 无自动化 | 由人类驾驶员全权操控汽车,可以得到警告或干预系统的辅助。 | 人类驾驶者 | 人类驾驶者 | 人类驾驶者 | 无 |
| 1 | 驾驶支持 | 通过自动驾驶系统对执行横向或纵向动态驾驶任务中的一项操作提供驾驶支持,其它的驾驶动作都由人类驾驶员进行操作。 | 人类驾驶者+系统 | 人类驾驶者 | 人类驾驶者 | 部分 |
| 2 | 部分自动化 | 通过自动驾驶系统对执行横向或纵向动态驾驶任务中的多项操作提供驾驶支持,其它的驾驶动作都由人类驾驶员进行操作。 | 系统 | 人类驾驶者 | 人类驾驶者 | 部分 |
| 自动驾驶系统(在运行时)执行全部动态驾驶任务 | ||||||
| 3 | 有条件自动化 | 由自动驾驶系统完成部分驾驶操作,当动态驾驶任务结束并准备发出干预请求、以及发生其它车辆系统的动态驾驶任务性能相关的系统故障时,人类驾驶员需要在适当的时候作出反应。 | 系统 | 系统 | 人类驾驶者 | 部分 |
| 4 | 高度自动化 | 持续性和可操作的运行范围——由自动驾驶系统执行所有动态驾驶任务和任务支援,人类驾驶员不一定需要对所有的系统干预请求作出应答。 | 系统 | 系统 | 系统 | 部分 |
| 5 | 完全自动化 | 自动驾驶系统对全部动态驾驶任务和动态驾驶任务支援进行持续性的和无条件的执行(不针对设计运行范围),而不期望人类驾驶员会对干预的请求作出反应。 | 系统 | 系统 | 系统 | 全域 |
L0~L5(基于SAE J3016-2016整理