(1)简介
人类和机器人能够通过合作在自然环境中完成任务,并能成功地在日常生活中发挥有益的作用。设计智能社交机器人的目的是帮助人们日常交流的方方面面。机器人的主动行为是影响人的有效社交方式之一。传统的人机交互行为一般是由人发起的。然而随着机器智能化水平的提升,越来越多的人机交互从机器主动的(proactive)发起。机器人的自动执行行为对人类存在一些潜在的风险,例如导致人类出现情境意识下降、自满和技能退化等情形。
在实际情况下,机器人的主动行为主要是智能体的自动化功能。机器人自主和主动行为的第一个特点是对人类意图的预期。主动行为是一种模仿人的行为,包括信息检索和情境意识等。机器人对环境和行为信息进行预测,并自主选择交互策略来改变已完成的环境状态。机器人自主和主动行为的第二个特点是对目标对象行为的影响。最初,主动行为的概念被认为是一种人类社会行为,例如,与领导、社会互动和商业关系有关。个人的主动行为指的是在情境中的预期的、面向变化的和自我发起的行为。当人类拥有积极主动的个性或从事积极主动的行为时,它可以帮助他们提高社会接受度。当机器人主动与人类交互的时候,也会发生同样的情况。人们能够感知到的机器人的社会类别是新奇的,这可以导致人类行为的改变,例如更积极的社会交流、不同的社会规范等。
本研究基于湖南大学承担的“百度智能机器主动交互设计研究”项目,面向社会化机器人在家庭服务中的主动行为,探索主动交互和拟人感知之间的关系,同时通过评估人们对机器人行为的拟人感知来评估机器人主动交互行为的社会体验。
(2)研究设计
在拟人感知和人的社会体验方面,研究将“温暖”和“心理归因”作为衡量机器人社会行为拟人化的两个维度。前者基于社会认知的研究基础,后者基于机器能力的相关研究。这两者均都可以被认为是感知者行动的目标,因此,本研究提出如下假设:
H1:温暖(H1a)和心理归因(H1b)是根据机器人主动行为的变化来衡量人类对机器人拟人化感知的有效方法。
H2:在不同的主动交互程度中,人对温暖的感知和心理归因有显著的差异。
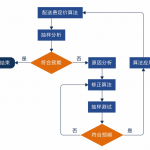
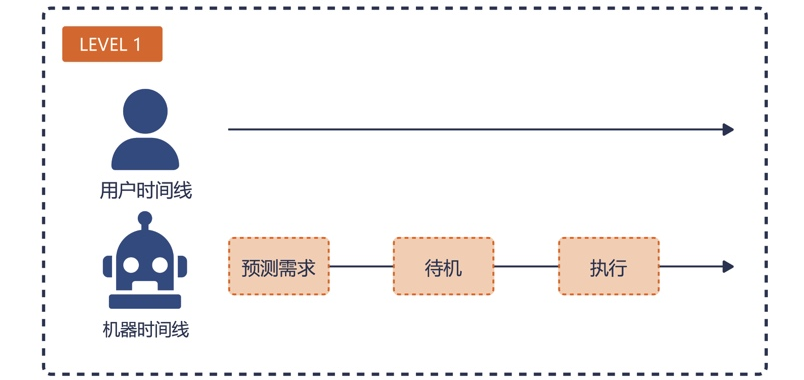
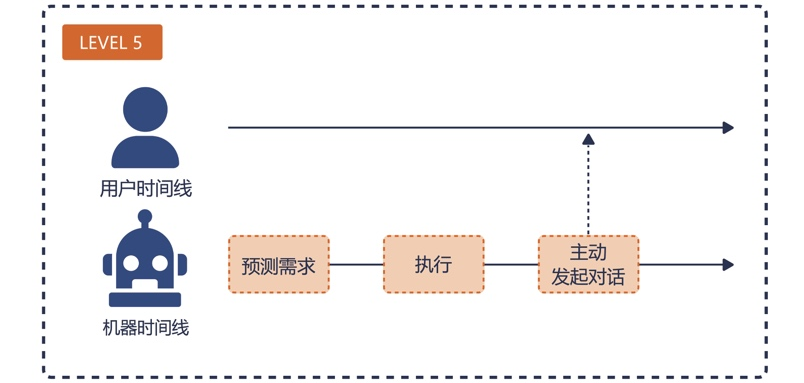
研究使用绿野仙踪方法,基于机器人的自动化等级、机器人通过主动行为发送的信息量和被试的注意力资源来实现社交互动。研究以一个交互式社交机器人原型为基础,将本研究中的主动互动模型分解为五个层级(层级1至层级5)。该模型由交互流程中的三种动作步骤组成(图1):第一步是机器人利用相关服务数据分析对被试的下一步需求做出假设,这是所有五个层次的起点。第二步是机器人根据第一步制定的策略执行某些主动行为,根据不同的主动水平有五种不同的情境:
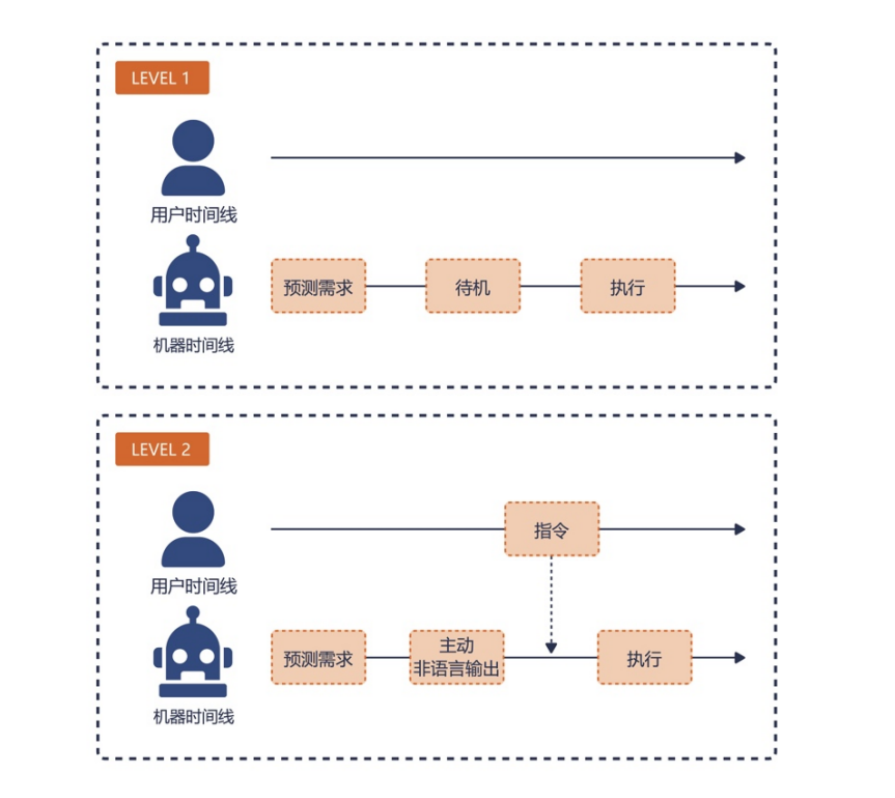
级别1 没有来自机器人的主动信息;
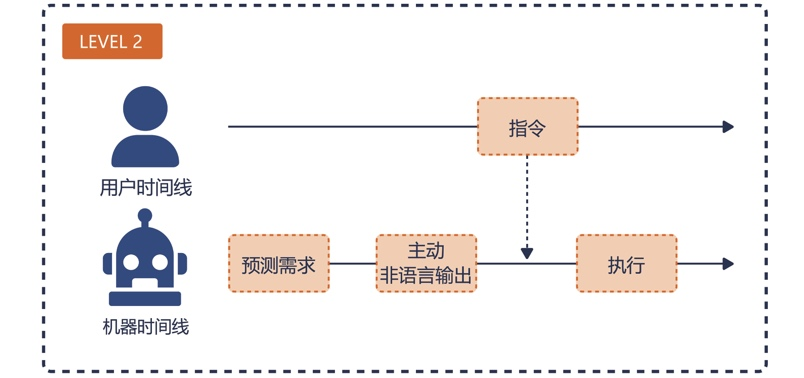
级别2 机器人主动提供非语言输出,例如灯光信号,以指示它正在等待被试说话;
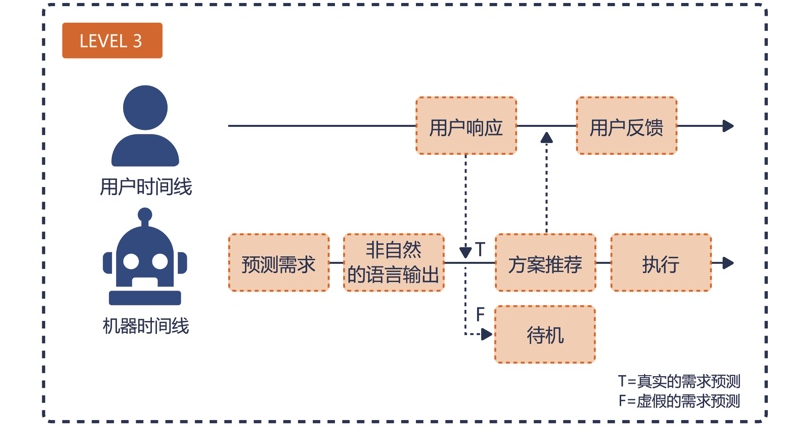
级别3 机器人通过声音但非自然的语言输出,主动向被试提供服务提示,例如提示音或旋律;
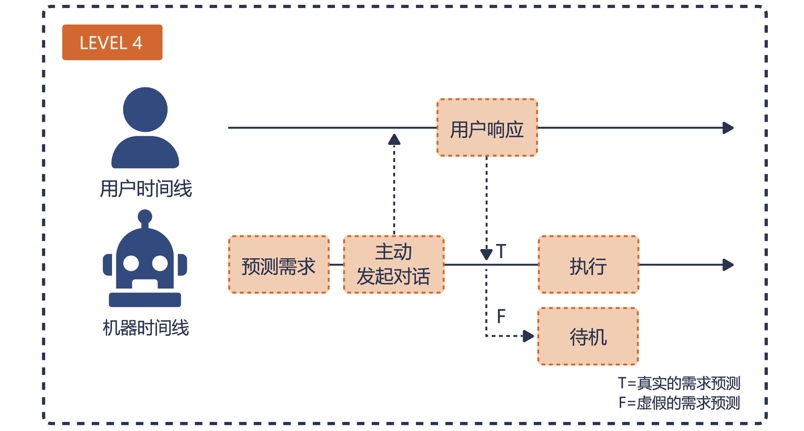
级别4 机器人主动发起与被试的对话,并推荐服务选项来执行;
级别5 机器人主动执行服务,并以自然语言报告结果或情况。
最后一步是在人和机器人之间实现交互。被试将在除第1级之外的所有级别接收信息并进行适当的交互。另外,在第5级,被试需要接收机器人报告的综合信息,但不需要在第5级给出反馈。然而,他们需要仔细倾听才能完全理解机器人刚刚执行了什么。
图1 社交机器人与人类互动的主动行为的5个情境
除此以外,研究使用了五点李克特量表来评估被试对社会过程中拟人化的感知,较高的量表分数表示较高的一致性。在实验中,机器人的拟人特征是因变量,采用人的温暖和心理归因作为13个项目的子量表。一旦实验完成,被试还要求根据其经验对拟人化量表进行排名。
在本实验中,家庭社交机器人的功能是通过选择典型的使用场景(指日常任务使用家庭设备)来演示的,主动行为是通过基于音频,结合灯光、图形界面和动作来体现。实验中的事件是基于典型的日常使用场景和上下文感知触发条件,根据上述主动行为水平选择。本研究的三个事件场景包括设备控制、环境调整和媒体播放。
(3)过程与结果
本研究共有60名被试(36名女性,24名男性)参加。被试进入预先构建的任务场景后,机器人将根据五个不同层次的主动交互脚本与被试进行交互。在实验过程中,研究人员通过录像记录了被试和社交机器人如何操纵任务的社会行为。实验完成后,被试需要填写实验量表,并接受研究者的访谈。
研究使用多元逻辑回归进行数据分析,结果如表1。从表中可以看出,多元逻辑回归模型拟合结果具有统计学意义(P<0.001)。研究将主动行为水平1作为参考组,并基于此形成了四对模型的比较结果:2级和1级的对比,3级和1级的对比,4级和1级的对比,5级和1级的对比。
| 主动级别a | B | SE | Wald | Df | P | OddsRatio | Lower | Upper | |
| Level 2 | 心理归因 | -.804 | .271 | 8.819 | 1 | .003 | .448 | .263 | .761 |
| Level 3 | 温暖 | .758 | .288 | 6.935 | 1 | .008 | 2.135 | 1.214 | 3.753 |
| Level 4 | 温暖 | 1.508 | .328 | 21.133 | 1 | .000 | 4.516 | 2.375 | 8.588 |
| Level 5 | 温暖 | 1.536 | .333 | 21.262 | 1 | .000 | 4.646 | 2.418 | 8.924 |
表1 多逻辑回归分析结果
研究结果表明假设H1a被接受。从数据中可以看出,主动行为与拟人化感知之间存在有意义的关系,即机器人主动行为越多,感知到的温暖越多(OR>1)。
但是,实验结果表明H1b被拒绝。第一对的解释(1级对比2级):主动行为和拟人化感知之间有意义的关系是心理归因(OR=0.448,95%置信区间: [0.263-0.761])。这一发现表明,没有一个积极主动的行为(1级)比2级有更高的感知心理归因。基于后续的访谈,研究发现其原因可能是人们认为机器人具有独立思考和执行的能力。例如,一个被试提到他觉得它(机器人)只是更冷漠地专注于直接执行,比如一个冷漠的管家,他以沉默、快速和正确的方式做每件事。
针对研究的假设H2,在不同的主动交互程度中,人对温暖的感知(H2a)和心理归因(H2b)有显著的差异的问题,研究表明,两个假设均被接受。
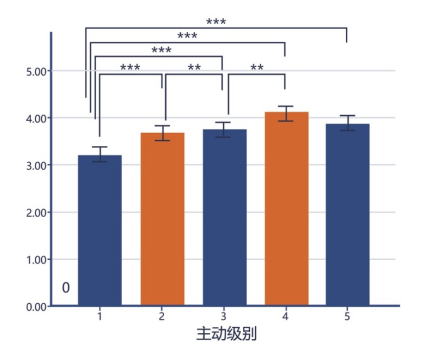
针对温暖的感知,五个模型的温暖感知评分差异显著(F (4,58) =13.839,p=0.000)。基于邦弗朗尼事后检验法,5级主动行为(M=4.20,SD=0.663)明显比1级(M=3.38,SD=0.679)、2级(M=3.53,SD=0.965)和3级(M=3.77,SD=0.821,;p<0.05)。
但是,研究的结果也显示:级别4和级别5之间不存在显著性差异(M =4.15,SD=0.621且M=4.20,SD=0.663,p<0.05)。针对这样的结果,在后续的访谈中,大部分被试评论说,1级机器人的行为让他们不知何故觉得机器人不礼貌,缺乏谦逊,不受人类控制。他们中的一些人对机器人的行为感到困惑。一名被试评论说:“我不知道它做了什么。太不主动,太失控,让我觉得没那么礼貌。”4级机器人的行为被认为是最有思想和礼貌的行为,让受试者觉得机器人真的很关心他们。5级符合用户使用服务的意向。有一名被试评论道:“机器人向我报告他(它)的服务信息后,让我觉得他(它)在等我的称赞。这种沟通方式会让我感觉更好。”
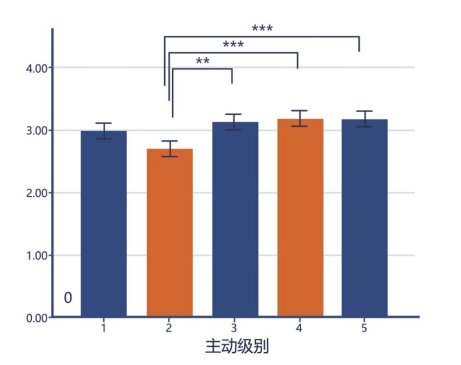
针对心理归因,研究结果显示:不同主动级别的心理归因有显著差异(F(4,58)=3.924,p=0.004)。邦弗朗尼事后检验显示,只有3级、4级和5级主动行为(M=3.11,SD=0.767;M=3.16,SD= 0.767和M =3.21,SD=0.825)与水平2 (M=2.68,SD=0.870,P<0.05)不具备显著性差异。从访谈结果来看,4级和5级机器人行为的主要积极方面如下:性格特征(33.3%)、理解人(26.6%)和与人相似的感觉(13.3%)。例如访谈中,一位被试报告说,“我可以从(机器人行为的)上下文中感觉到,它(机器人)帮助我更有个性、更潇洒地做事,就像一个活生生的小助手。我能理解它主动提醒我水开了,关了。”与4级和5级相比,2级的机器人没有人格知觉(21.6%)、反应迟钝(16.6%)和服从态度(15%)。一位被试说:“它只有一种服从的态度,我在使用的过程中有一种恐惧感。”
(4)讨论
总的来说,人机融合的机器行为反映出了未来人类与智能机器展开紧密合作的一种新全新的情境。从人机功能分配到主动机器行为,都深刻反映出理想中的“弹性”人机关系的一些画面。这对于机器行为学而言具有重要的意义。
本研究的定量数据显示,被试对不同程度的主动行为的感知存在显著差异,主动行为可以帮助机器人变得更像人类。这种行为可以给人以与机器人相处的情感体验,比如温暖、信任、安全感等等。然而只有在行为可控的情况下,机器人才能为人们创造理想的体验。机器人的主动交互可以使人们产生使用的意图,引导人们做出下一步的决策。从访谈中,除了本研究测量的温暖和心理归因两个维度外,人格、理解和安全感也被多次提及。
本研究的结果为家庭环境中社交机器人的拟人化提供了设计启示。机器人在与人类互动的过程中,可以根据自己的社会任务选择使用不同层次的主动行为来提高服务质量。同时本研究还尝试基于当前的技术可行性,如用户需求预测、执行能力、动作、语音用户界面和图形用户界面等,通过多种交互方式的组合来执行机器人的主动社交行为,为机器人的主动行为设计和表达提供参考。