(1)简介
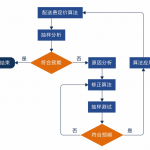
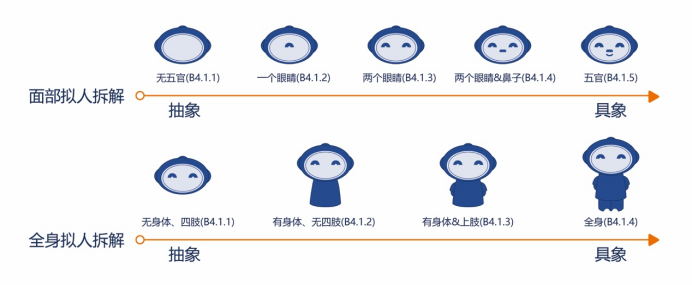
本研究基于湖南大学和百度人工智能交互设计院进行的“智能产品外观设计研究项目”。该研究项目旨在探寻各种智能机器形态特征(如造型、色彩、体量等因素)对人们对智能机器的感知的差异。在研究初期,基于对工业设计师的访谈与专家jing ayn等,初步得到了如图1的结论。
在此基础上,本研究围绕百度自动驾驶汽车在长沙运营的用户界面设计的需要,以自动驾驶汽车交互界面的虚拟智能机器人为对象,研究人们对不同拟人程度的感知以及信任和喜爱等体验。
(2)虚拟智能机器人拟人化实验素材设计
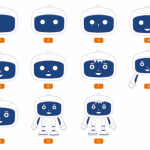
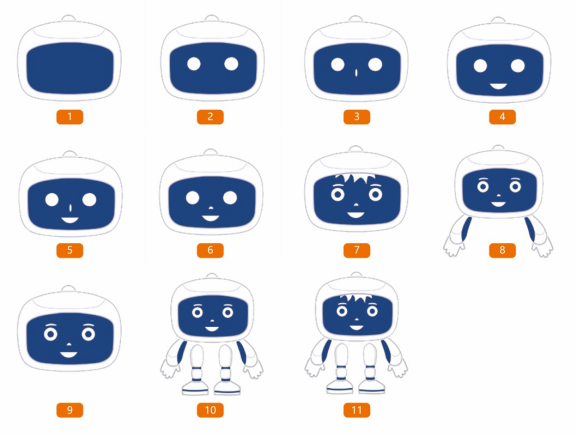
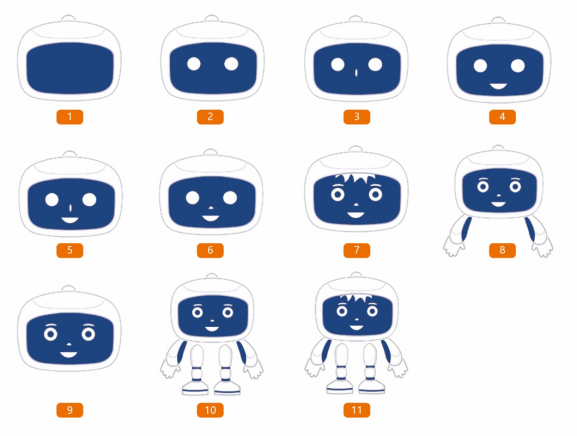
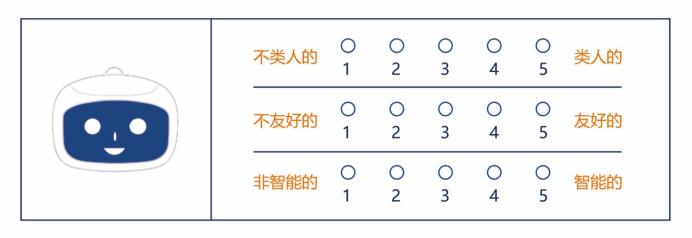
虚拟智能机器人素材设计从设计师的创作开始。由湖南大学和百度的设计师基于经验初步设计11张由不同拟人外表特征构成的拟人化智能代理形象图片素材,如图2。然后邀请被试97名(男性46名,女性51名,平均年龄29岁)对图片的拟人程度进行评分。所有图片素材通过调查问卷向被试随机展示,被试每观看一张图片,需要对3个拟人感知量表进行5点语义差异评分,如图3。
L
采用重复测量方差分析(RM-ANOVA)对上述评分数据进行分析,可以得到:F=87.362,p<0.001,ηp²=0.645,表明素材之间拟人感知评分有显著性差异。方案11和方案1不出意外得分均值最高(M=3.82,SD=0.069)和最低(M=1.13,SD=0.029)。方案5得分均值居中(M=3.15,SD=0.087)。经邦弗朗尼事后检验法校正,对该三张图片评分的事后比较(post-hoc)显示,两两对比均有显著差异。因此,本研究选出图片1、5、11作为低、中、高三种拟人化程度设计素材用于后续实验,见表1。
| 拟人化程度 | 均值 | 标准差 | 拟人图片素材 |
| 低拟人化 | 1.13 | 0.029 |  |
| 中拟人化 | 3.15 | 0.087 |  |
| 高拟人化 | 3.82 | 0.069 |  |
基于上述的研究结果,为了与后续需要设计的百度在湖南省长沙市运营的无人驾驶出租车的设计相匹配,本研究进一步设计了三个拟人化自动驾驶汽车辅助驾驶的界面。最终界面设计如图4,分别为“(a)低、(b)中、(c)高”三种拟人程度的虚拟机器人形象。界面左侧呈现的信息一致,包含汽车行驶的基本信息、对周围环境的感知信息等。

(3)实验设计
本研究选取了七个自动驾驶过程中常见的任务,并辅以自动语音提示。具体的任务以及对应的语音提示如表2。
| 任务列表 | 对应的语音提示列表 |
| 1.车辆启动 | 1.车辆启动前往目的地 |
| 2.直行 | 2.车辆正在直行 |
| 3.右转 | 3.前方180m右转 |
| 4.避让行人 | 4.探测到前方有行人通过,停车等待 |
| 5.紧急停车 | 5.探测到前方有危险,紧急停车 |
| 6.红灯等待 | 6.前方红灯,停车等待 |
| 7.到达目的地 | 7.到达目的地已停车 |
实验在湖南大学虚拟驾驶实验室进行,采用三维模拟驾驶软件,构建虚拟驾驶情境。实验场景布置包含投影仪一部,用于投射模拟自动驾驶行程的视频素材;固定在设定位置的iPad Pro一部,用于模拟呈现车内不同外表拟人化程度的交互界面;摄像机3台,用于记录实验过程。
每名被试均体验所有的七个任务,但任务出现的顺序按照随机方式出现。每段任务行程结束后,被试需填写问卷,并进行访谈。
本实验的研究问卷由19个量表组成,根据相关的研究论文的量表设计进行修正。量表包含用户对自动驾驶汽车拟人度(7个问题)、信任度(8个问题)和喜爱度(4个问题)三个指标类别。所有变量的克朗巴哈系数α值均介于0.79和0.84,表明问卷项目有较强的内部一致性和可靠性。研究使用李克特7点量表,1分表示完全不认同,7分表示完全认同。
| 维度 | 要素 | 表述 |
| 拟人化程度 | A1 | 这辆汽车很聪明 |
| A2 | 汽车可以感受到汽车周围发生的事情 | |
| A3 | 汽车可以预见即将发生的事情 | |
| A4 | 汽车决定它的行动 | |
| A5 | 汽车有自己的意图 | |
| A6 | 汽车有自己的想法 | |
| A7 | 汽车体验到了情感 | |
| 信任度 | T1 | 汽车具有误导性 |
| T2 | 我怀疑汽车的意图和行为 | |
| T3 | 我对这辆车很有信心 | |
| T4 | 汽车提供了安全保障 | |
| T5 | 汽车是可靠的 | |
| T6 | 这辆车很友好 | |
| T7 | 我可以相信这辆车 | |
| T8 | 我熟悉这辆车 | |
| 喜爱度 | L1 | 我的乘车体验很愉快 |
| L2 | 我觉得乘车很舒服 | |
| L3 | 我想拥有一辆像这样的车 | |
| L4 | 我认为这也是我未来喜欢的车 |
(4)实验过程与结果
实验共邀请149名被试(其中女性66人),平均年龄29.4岁,被试均对自动驾驶技术有一定了解,且没有从事车辆工程和汽车交互设计相关工作或研究。
实验结果如表4所示。通过单因素方差分析,发现三个实验指标均具有显著性:拟人感知度(F=19.92,p<0.001)、信任度(F=23.2,p<0.001)、喜爱度(F=14.87,p<0.001)。研究结果表明,人们可以对虚拟智能机器人不同的拟人感知度进行认知。同时,随着拟人程度的增加,虚拟智能机器人的信任度和喜爱度呈上升趋势。
| 变量 | 低拟人化条件均值(标准差) | 中拟人化条件均值(标准差) | 高拟人化条件均值(标准差) |
| 拟人感知度 | 3.56 | 4.57 | 5.01 |
| (0.96) | (0.69) | (0.78) | |
| 信任度 | 3.26 | 4.38 | 4.32 |
| (0.47) | (0.36) | (0.38) | |
| 喜爱度 | 3.39 | 4.4 | 4.47 |
| (1.23) | (1.02) | (0.99) |
本研究并没有发现存在所谓的恐怖谷效应,这主要与本研究的拟人化程度与完全逼真的人类的形象还有较大差异,或者说,最接近人的形象的虚拟智能机器人(第11号)也离真实的人的形象还有较大差异。这也是目前智能汽车拟人设计的现状。因此,可以初步得到结论:在不那么逼真的虚拟智能机器人的形态上,更高程度外表拟人化会引发用户更高的拟人度感知,并获得更高的信任度和喜爱度。
(5)讨论
本研究作为一个描述性研究,探寻了自动驾驶汽车交互界面的虚拟智能机器人的拟人程度对用户信任和喜好程度的影响。在后续的百度自动驾驶出租车Robotaxi长沙运营所开展的界面设计中,采用了高拟人度的设计。在增强现实-抬头显示(AR-HUD)的界面设计中,虚拟机器人是一个包含四肢的拟人形象,如图5。但是,为了保留科技感,概念设计方案还是使用了抽象的面部表情。

形态设计是一种艺术设计形式。从艺术设计的角度来看,拟人并不一定代表了静态机器行为设计最重要的方向——因为从设计的角度,智能机器应该有属于自己的形式。