(1)简介
人们对自动驾驶汽车的安全性总是持怀疑和担忧态度,因为他们认为自动驾驶汽车尚未达到可接受的安全水平。尽管已证明在没有人工操作的情况下启动自动导航是足够安全有效的。然而,安全是人们对自动驾驶汽车最关注的要素,因此满足人们对自动驾驶汽车的安全体验是至关重要的。但是,自动驾驶汽车的实际安全性与人们所体验的安全性之间存在差异。
本研究基于湖南大学承担的“华为汽车智能交互体验研究”项目,研究人们感知和期望自动驾驶汽车的安全体验的影响因素,以提升人们对智能汽车的安全体验。
(2)研究模型与假设
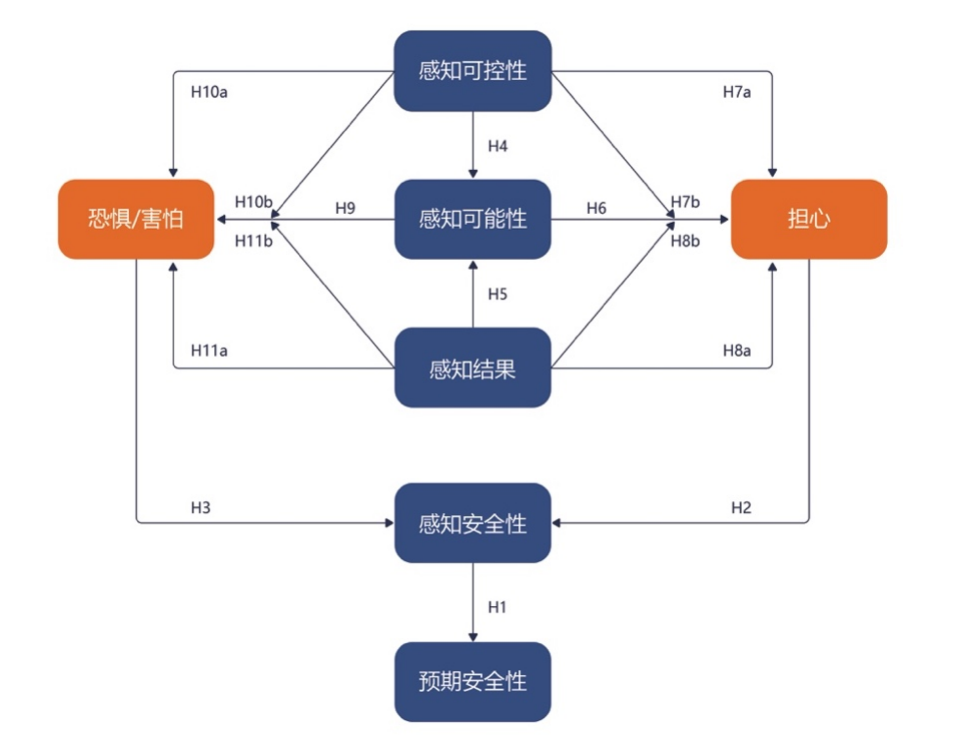
本研究采用经典的行为科学研究范式,构建研究模型与假设,通过实验对模型与假设进行逐一验证。本研究的模型基于对风险敏感性,与风险相关的感觉和安全性判断之间的联系的相关研究而构建的(图1)。
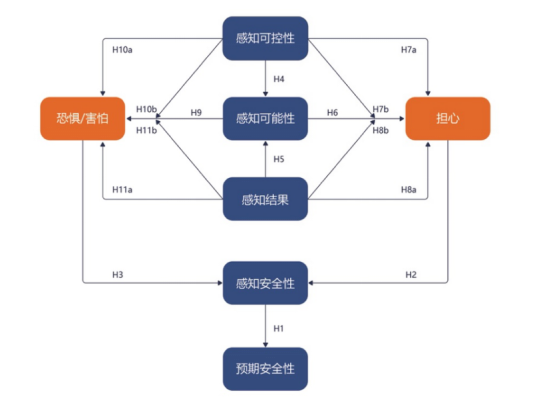
本研究及其框架旨在验证风险敏感性和与风险相关的体验对智能机器感知安全性和预期安全性的作用。本研究提出以下假设:
假设H1:一个人对自动驾驶汽车的感知安全性(PS)与预期安全性(ES)正相关。
假设H2:忧虑(W)与一个人对自动驾驶汽车的感知安全性负相关。
假设H3:恐惧(D)与一个人对自动驾驶汽车的感知安全性负相关。
假设H4:一个人对自动驾驶汽车的感知可控制性(PC)与其感知可能性(PL)负相关。
假设H5:一个人对自动驾驶汽车的感知结果(PCQ)与感知可能性(PL)正相关。
假设H6:一个人对自动驾驶汽车的感知可能性(PL)与其对自动驾驶汽车的担忧(W)正相关。
假设H7a:一个人对自动驾驶汽车的感知可控制性(PC)与其对自动驾驶汽车的担忧(W)负相关。
假设H8a:一个人对自动驾驶汽车的感知结果(PCQ)与其对自动驾驶汽车的担忧(W)呈正相关。
此外,本研究将验证感知结果和感知可控制性和对自动驾驶汽车的担忧之间的两个间接关系。因此提出假设:
假设H7b:一个人对自动驾驶汽车的感知可能性(PL)对忧虑(W)的影响可以通过感知可控制性(PC)得以缓解。
假设H8b:一个人对自动驾驶汽车的感知可能性(PL)对忧虑(W)的影响可以通过感知后果(PCQ)得以缓解。
同时,研究恐惧是否会像担心一样是重要的,因此,对于恐惧,存在类似的假设:
假设H9:一个人对自动驾驶汽车的感知可能性(PL)与其对自动驾驶汽车的恐惧感(D)正相关。
假设H10a:一个人对自动驾驶汽车的感知可控制性(PC)与其对自动驾驶汽车恐惧感(D)负相关。
假设H11a:一个人对自动驾驶汽车的感知结果(PCQ)与其对自动驾驶汽车的恐惧感(D)正相关。
假设H10b:一个人对自动驾驶汽车的感知可能性(PL)对恐惧感(D)的影响可以通过感知可控制性(PC)得以缓解。
假设H11b:一个人对自动驾驶汽车的感知可能性(PL)对恐惧感(D)的影响可以通过感知后果(PCQ)得以缓解。
(3)方法与过程
研究采用在线问卷结合量表的方式进行。本次调查中测量的七个体验测量要素分别是感知可能性,感知结果,感知可控制性,恐惧,担忧,感知安全性和预期安全性。每个结构因素均基于已有的相关内容,具体的体验测量要素如表1所示。
| 体验测量要素 | |
| 感知可能性 | PL1:被试认为成为自动驾驶技术崩溃的受害者的可能性多大 |
| PL2:被试认为成为自动驾驶汽车故障的受害者的可能性有多大 | |
| PL3:被试认为成为自动驾驶汽车与其他车辆碰撞受害者的可能性有多大 | |
| PL4:被试认为成为自动驾驶汽车不遵守交通规则的受害者的可能性有多大 | |
| 感知可控性 | PC1:当他们成为自动驾驶技术崩溃的受害者时,被试会在多大程度上感到能够控制 |
| PC2:当他们成为自动驾驶汽车故障的受害者时,被试会在多大程度上感到能够控制 | |
| PC3:当他们成为自动驾驶汽车与其他车辆碰撞的受害者时,被试会在多大程度上感到能够控制 | |
| PC4:当他们成为自动驾驶汽车不遵守交通规则的受害者时,被试会在多大程度上感到能够控制 | |
| 感知结果 | PCQ1:被试认为自动驾驶技术崩溃的后果有多严重 |
| PCQ2:被试认为自动驾驶汽车故障的后果有多严重 | |
| PCQ3:被试认为自动驾驶汽车与其他车辆相撞的后果有多严重 | |
| PCQ4:被试认为自动驾驶不遵守交通规则的后果有多严重 | |
| 担忧 | W1:被试在多大程度上同意“我担心自动驾驶汽车造成的事故” |
| W2:被试对“我担心自动驾驶汽车事故频发”的认同程度如何 | |
| W3:被试在多大程度上同意“我担心自动驾驶汽车造成的致命事故” | |
| W4:被试在多大程度上同意“我担心自动驾驶运行地区会因为自动驾驶汽车而发生严重事故” | |
| 恐惧 | D1:被试在多大程度上同意“想到AV就感到恐惧” |
| D2:被试在多大程度上同意“如果自动驾驶汽车在我的地区运行,我会感到恐惧” | |
| D3:被试在多大程度上同意“如果我需要乘坐自动驾驶汽车,我会感到恐惧” | |
| 感知安全性 | SP1:被试目前在多大程度上对自动驾驶汽车感到安全 |
| SP2:被试在多大程度上同意有关自动驾驶汽车的研究机构报告说自动驾驶汽车比人类驾驶员安全得多” | |
| 预期安全性 | SE1:与传统车辆相比,请被试评价他们期望的安全水平 |
| SE2:要求被试评价他们与当前AV相比所需的安全水平 |
研究在2019年12月至2020年2月之间进行了在线调查(总共185位被试)。所有研究均在国内某商业市场研究网站执行。该网站是一个专业的在线调查网络,在中国拥有超过5000万用户。研究人员随机分配了调查表。研究向被试保证所有结果将以汇总形式发布,以保证参与者的隐私,被试并在完成调查后可以参与抽奖活动作为参与报酬。
在被试中,排除了12个不合格的样本(4个在极短时间内完成的样本,8个未通过注意力测试)。最后得到了173份合格的问卷用于后续的分析。人口统计特征包括性别,年龄,受教育程度,月收入和驾照持有时间(表2)。由于研究发现风险敏感性和人口统计学变量之间没有显著相关性,因此本研究未对人口统计学数据进行分析。
| 人口特征变量 | 人口特征变量 | 数量 | 占比 |
| 性别 | 女性 | 80 | 46.2 |
| 男性 | 93 | 53.8 | |
| 年龄 | 18-29 | 152 | 87.9 |
| 30-44 | 12 | 6.9 | |
| 45-59 | 8 | 4.6 | |
| >60 | 1 | 0.6 | |
| 受教育程度 | 初中及以下 | 3 | 1.7 |
| 高中 | 7 | 4.0 | |
| 大专 | 11 | 6.4 | |
| 大学本科 | 55 | 31.8 | |
| 研究生及以上 | 97 | 56.1 | |
| 月收入 /人民币 | <2000 | 77 | 44.5 |
| 2000-5000 | 44 | 25.4 | |
| 5000-10000 | 23 | 13.3 | |
| >10000 | 29 | 16.8 | |
| 驾驶证 /年 | 无 | 51 | 29.5 |
| <1 | 26 | 15.0 | |
| 1-5 | 73 | 42.2 | |
| 5-10 | 20 | 11.6 | |
| >10 | 3 | 1.7 |
(4)结果
在检验假设之前,需要评估测量模型。研究首先进行了KMO(Kaiser-Meyer-Olkin)检验和巴特利特(Bartlett)的球度测试。测试的KMO检验值为0.829,巴特利特的“球形度测试”值为0.0000。因此,研究的样本符合因子分析的要求。
考虑到因子负载反映了观察到的项目可以解释其相应潜在结构因素的程度。重新检查具有低因子负载的项目后,本研究删除了假设PL1。然后,本研究对收敛效度和区别效度开展测量。收敛效度代表了同一结构因素中各项目的相关性,采用平均方差提取(自动驾驶汽车E)表示。判别有效性表示不同结构因素中项目的相关性,预期应小于自动驾驶汽车E的平方根。复合可靠性(CR)的值和克朗巴哈系数(Cronbach’s alpha)值应高于0.60。表16.3显示了每种结构因素的均值、标准差,克朗巴哈系数,复合可靠性和自动驾驶汽车E的详细信息以及各项目的因子负载(FL)。表3给出了区别效度和相关矩阵的结果。
| 结构因素 | 项目 | M | SD | FL | α | CR | AVE |
| 感知可能性 | PL1 | 3.74 | 0.94 | 0.79 | 0.76 | 0.86 | 0.69 |
| PL2 | 3.63 | 0.95 | 0.76 | ||||
| PL3 | 3.50 | 0.91 | 0.81 | ||||
| PL4 | 2.86 | 1.06 | 0.62 | ||||
| 感知可控性 | PC1 | 2.94 | 0.94 | 0.75 | 0.85 | 0.90 | 0.69 |
| PC2 | 2.77 | 0.91 | 0.91 | ||||
| PC3 | 2.64 | 0.93 | 0.84 | ||||
| PC4 | 2.63 | 1.05 | 0.82 | ||||
| 感知结果 | PCQ1 | 3.72 | 0.87 | 0.82 | 0.86 | 0.90 | 0.70 |
| PCQ2 | 3.73 | 0.84 | 0.86 | ||||
| PCQ3 | 3.81 | 0.87 | 0.84 | ||||
| PCQ4 | 3.58 | 0.96 | 0.83 | ||||
| 担忧 | W1 | 3.68 | 0.97 | 0.88 | 0.89 | 0.93 | 0.76 |
| W2 | 3.18 | 1.12 | 0.82 | ||||
| W3 | 3.39 | 1.10 | 0.89 | ||||
| W4 | 3.48 | 1.05 | 0.90 | ||||
| 恐惧 | D1 | 2.50 | 1.07 | 0.92 | 0.92 | 0.95 | 0.86 |
| D2 | 2.57 | 1.06 | 0.92 | ||||
| D3 | 2.76 | 1.04 | 0.94 | ||||
| 感知安全性 | SP1 | 2.91 | 0.75 | 0.82 | 0.71 | 0.87 | 0.77 |
| SP2 | 2.93 | 0.94 | 0.93 | ||||
| 预期安全性 | SE1 | 80.36 | 24.19 | 0.95 | 0.92 | 0.96 | 0.92 |
| SE2 | 82.83 | 21.42 | 0.97 |
| 结构因素 | PL | PC | PCQ | W | D | PS | ES |
| 感知可能性 | 0.824 | ||||||
| 感知可控性 | -0.333 | 0.831 | |||||
| 感知结果 | 0.434 | -0.392 | 0.835 | ||||
| 担忧 | 0.545 | -0.375 | 0.578 | 0.870 | |||
| 恐惧 | 0.323 | -0.175 | 0.305 | 0.540 | 0.928 | ||
| 感知安全性 | -0.341 | 0.270 | -0.223 | -0.473 | -0.437 | 0.877 | |
| 预期安全性 | -0.139 | -0.086 | 0.150 | 0.089 | 0.148 | -0.116 | 0.959 |
删除PL1后,所有项目均与其结构因素具有高度相关性(因子负载>0.7)。研究的七个结构因素的自动驾驶汽车E值范围从0.69到0.92,克朗巴哈系数值介于0.86和0.96之间。根据表16.4,每个结构因素的自动驾驶汽车E的平方根显著大于其与其他因素的相关系数。该结果具有良好的区别效度。因此,该测量模型被证明是可靠且有效的。
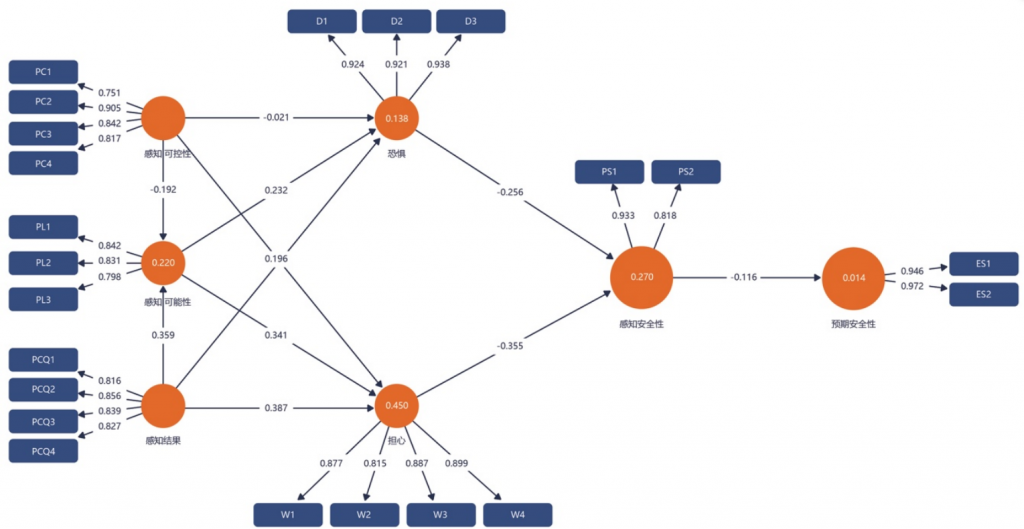
对于风险敏感性模型,研究的支持以下结论:感知可能性受到“感知可控制性”的负面影响(ß=-0.192,P <0.01),受到“感知结果”的正面影响(ß=0.359,P <0.01),该假设支持假设H4和H5,并解释了22%的感知可能性方差。感知可能性(ß=0.341,P <0.01)和感知后果(ß=0.387,P <0.01)对忧虑有积极的显著影响,这支持了假设H6和H8a。但是,感知可控制性对忧虑没有显著影响(ß=−0.110,P >0.01),因此不支持H7a。忧虑具有45%的解释力和感知可能性。该结果与2011年杰克逊(J. Jackson)的研究相似。研究通过自举抽样的方式测试了假设H7b和H8b。结果表明,感知可能性(间接影响=0.002)和感知可控制性(间接影响=0.049)对忧虑的影响是通过感知结果影响的,这一结果验证了假设H7b和H8b,但感知可控制性对忧虑的间接影响却没有非常明显。恐惧的风险敏感性结果与担忧相似,恐惧受到感知可能性(ß=0.232,P <0.01)和感知后果(ß=0.196,P <0.01)的正向影响,这一结果支持假设H9和H11a。但假设H10a未得到证实(ß=−0.021,P>0.01)。值得一提的是,风险敏感性模型对恐惧的显著性不如担心。间接测试的结果表明,感知可能性对恐惧的影响是通过感知结果间接影响的(间接效应=0.031),这一结果支持了假设H11b。但是,感知可控制性对恐惧没有显示出任何间接影响(间接影响=0.099),因此假设H10b不成立。结构模型支持了假设H2和H3。忧虑和恐惧的感觉会对安全感知产生负面影响,但忧虑显示出比恐惧更显著的影响。但是,感知安全性不会对预期安全性产生影响,预期安全性不会产生令人满意的结果(R2=0.014)。因此,本研究不支持假设H1。
上述研究结果表明,SRMR=0.068的模型可以被接受。上述结果与2011年杰克逊关于忧虑与风险敏感性的研究和2007年查迪(D. Chadee)等关于恐惧对风险敏感性的研究结果一致。研究的模型支持了感知安全性的担忧与恐惧之间的差异。
(5)讨论
本研究旨在探索风险敏感性和与风险相关的感觉如何解释对自动驾驶汽车的安全体验,并在这些变量之间建立适当的联系,从而有可能更好地理解安全性判断的人类情绪与体验原因。对来自185个被试的数据的分析表明,研究验证了15个假设中的11个。首先对风险敏感性理论进行了测试并验证了H4和H5。风险敏感性中的感知可能性,感知可控制性和感知结果在一定程度上解释了担忧和恐惧感(H6,H7b,H8a,H8b,H9,H11a和H11b)。其中感知可控制性显示出较小的显著性。本研究的结果还表明:担忧和恐惧对感知安全性(H2和H3)具有负面影响。另外,本研究还发现感知安全性与预期安全性之间没有显著的相关性。
考虑到本研究旨在探讨人们如对自动驾驶汽车安全体验的体验因素。因此,研究只关注心理过程与体验,而未考虑其他因素,如人口统计学差异以及风险的背景描述等。后续的研究可以对这些重要因素进行讨论,以更全面地了解机器行为安全体验的心理过程。
特别需要说明的是:本研究采用的结构方程建模方法证明了较弱的因果关系,这是一种推论。需要对这些变量进行进一步的实验,以得出完全确定的因果关系,但这并不影响本研究的整体结论。事实上,自然实验条件的研究也具有类似的特征。
本研究结论受到样本本身的限制,因为尽管本研究试图平衡性别、教育和驾驶经验等因素,但研究的样本并不能完全代表中国人口,并且样本规模相对较小。考虑到自动驾驶汽车的特殊性,研究对被试进行了筛选来消除驾驶体验的影响。此外,自动驾驶汽车都可能以开放的年轻人作为优先测试用户进行试点(如百度、华为等),无论他是否获得驾驶执照。研究认为这些参与者的信息可以在一定程度上支持研究和结论。但是,如果研究想探索具有不同知识水平或驾驶经验的人们对自动驾驶汽车的态度,则需要对这些原因进行更多的实验。总体而言,研究结果表明,在公众对自动驾驶汽车的信任体验中,应高度重视受到风险敏感性和直接影响情绪的感知安全性。